SailMAV
Sailing flying robot for water envrionmental sensing

The SailMAV sailing-flying robot was developed to meet the need for a water surface vehicle capable of rapidly and autonomously deploying for environmental water sensing or disaster search and rescue missions.
Fixed-wing design enables long-term missions leveraing aerodynamic lift for high efficiency. Sailing very efficient and silent in water, making it suitable for collecting data in fragile environments. The sailing-flying robot addresses the need for flight flexibility combined with extended water-based monitoring. Its core innovation lies in using high-performance wings for both flight and sailing, enabling long-range flight and energy-neutral surface locomotion.
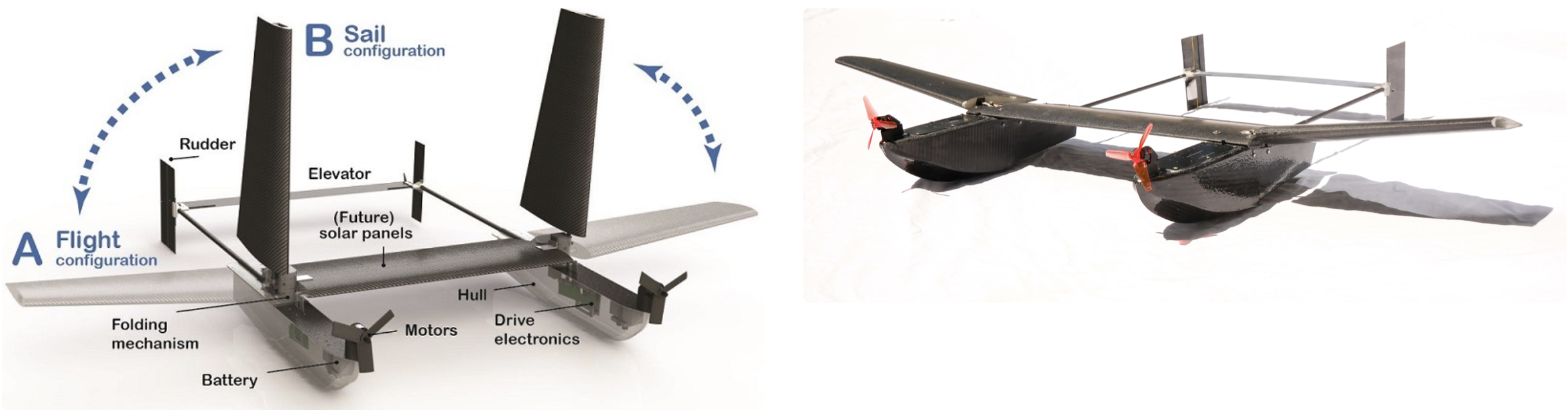
The robot's design, published first in RA-L [1], enables extended, precise missions at the water surface by harnessing wind for propulsion. It also provides the agility of flight to quickly reach target areas, navigate obstacles, and transition between water bodies, making it ideal for water sampling in complex environments. With a 0.96 m wingspan, the SailMAV utilizes the same wings and control surfaces for both sailing and flying. It achieves water surface locomotion, takeoff, and flight at a cruising speed of 10.8 m/s.
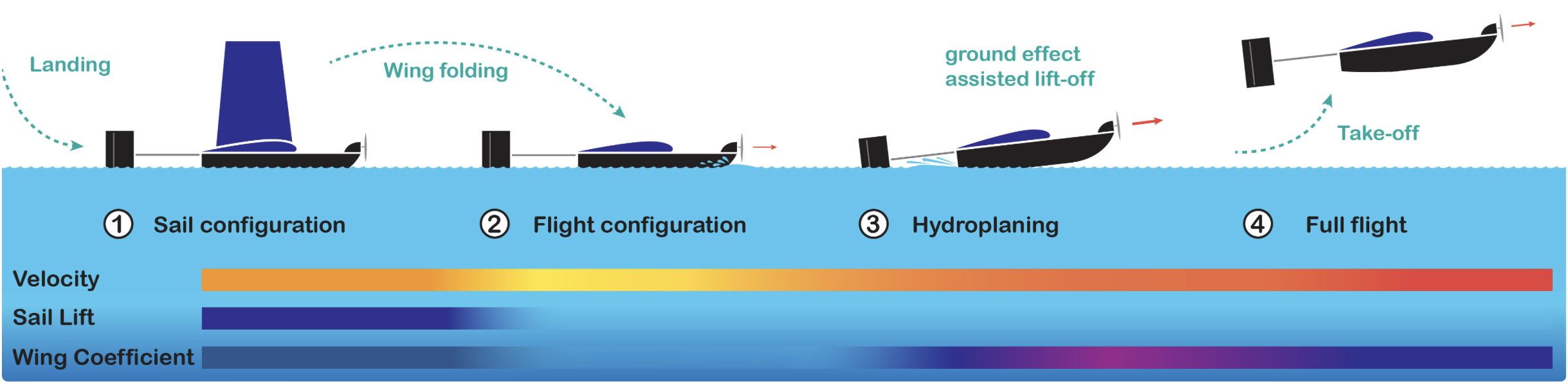
Sailing-Flight Cycle Overview: The robot lands on water, transitions to a sailing configuration, and carries out its mission. Takeoff is achieved through propelled acceleration, progressing from displacement mode to hydroplaning and finally becoming fully airborne.
The system was optimized for autonomous deployment in real-world scenarios. I developed a control system enabling autonomous mission execution, including an optimized tacking strategy. The system underwent extensive testing across Europe, including two deployments at Lake Vrana, Croatia, where the robot, equipped with an audio sensor, successfully performed tasks to scan the lake's ornithological area. This work culminated in a publication in IEEE Transactions on Field Robotics [2].
Ecological analysis brough to map the birds's species and abundance in Lake Vrana, comparing the data of both winter and summer expeditions. Results have been published in Remote Sensing and Conservation journal [3].
[1] R. Zufferey et al., "SailMAV: Design and Implementation of a Novel Multi-Modal Flying Sailing Robot," in IEEE Robotics and Automation Letters, 2019
[2] A. Farinha*, L. Romanello*, R. Zufferey, J. Lawson, S. F. Armanini, M. Kovac, “SailMAV: Water-surface locomotion and biodiversity monitoring”, in Transactions in Field Robotics, 2025
[3] J. Lawson, A. Farinha, L. Romanello, O. Pang, R. Zufferey, and M. Kovac, "Use of an unmanned aerial-aquatic vehicle for acoustic sensing in freshwater ecosystems", in Remote Sensing in Ecology and Conservation, 2023.