Simbi
Aerial-deployed underwater gripper for benthic operations

Underwater soft grippers exhibit potential for application such as monitoring, research, and object retrieval. However, existing underwater gripping techniques frequently cause disturbances to ecosystems. In response to this challenge, we present a novel underwater gripping framework comprising a lightweight gripper affixed to a custom submarine pod deployable via drone, launched in IEEE Robosoft 2024 [1]. This approach minimizes water disturbance and enables efficient navigation to target areas, enhancing overall mission effectiveness.
The pod allows for underwater motion and is characterized by four degrees of freedom. It is provided with a custom buoyancy system, two water pumps for differential thrust and two for pitching. The system allows for buoyancy adjustments up to a depth of 6 meters, as well as motion in the plane. The 3-fingered gripper is manufactured out of silicone and was successfully tested on objects with different shapes and sizes, demonstrating a maximum pulling force of up to 8 N when underwater.
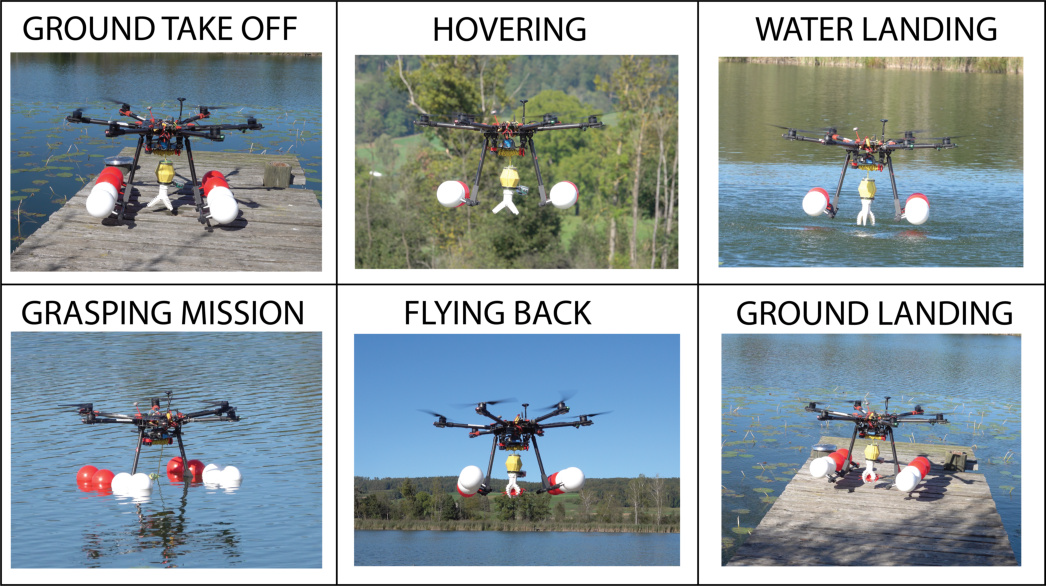
The reliability of the submarine pod was tested in a water tank by tracking its attitude and energy consumption during grasping maneuvers. The system also accomplished a successful mission in a lake, where it was deployed on a hexacopter. Overall, the integration of this system expands the operational capabilities of underwater grasping, makes grasping missions more efficient and easy to automate, as well as causing less disturbance to the water ecosystem.
Control systems have been developed in order to enhance the underwater locomotion capabilities of the pod [2].
[1] Romanello L. et al., Gotta catch ’em all, safely! Aerial-deployed soft underwater gripper, IEEE International Conference on Soft Robotics (Robosoft) 2024. Article
[2]Romanello L. et al., Simbi: Soft intelligent module for benthic interactions, [Submitted to Soft Robotics]